Jacob Ward Portfolio

AeroProbe
AeroProbe is a quadcopter drone equipped with a Pixhawk flight controller and several onboard sensors and microcontrollers for data collection. When I joined the project, the team was looking to develop a device capable of measuring wind speed and direction - two critical parameters in analyzing and predicting error in projectile motion.
Windsock Design
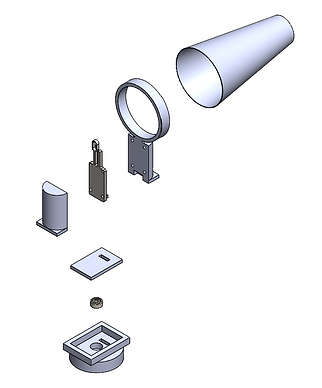
The windsock design consists of two subassemblies: the stationary base mounted on the top plate of the drone and the windsock assembly that rotates over the base. The windsock ensures the anemometer is oriented perpendicular to the direction of wind flow to obtain accurate wind speed measurements. A small, diametric magnet is glued to the bottom of the central shaft to obtain measurements of wind direction as it rotates over a magnetic rotary encoder.


Wind Tunnel
The windsock prototype was extensively tested in the wind tunnel to quantify its performance. The anemometer and encoder were connected to an Arduino to record measurements of wind speed and wind direction, respectively, during tests with various starting windsock orientations. Several tests were also conducted at various wind tunnel wind speeds.
AprilTags
Outdoor drone flight tests were conducted to collect data from the windsock prototype and capture aerial images of grounded AprilTags placed on either side of a checkerboard camera calibration pattern. For processing and data collection, a custom Python image analysis script undistorts these images and calculates the center-to-center distance, in pixels, between the AprilTags as well as the altitude of the camera (distance from AprilTags, in meters) when the image was captured. Since the AprilTags are placed a fixed, known distance apart, a plot of Distance Ratio (px/m) vs. Altitude (m) can be constructed and used to obtain real world dimensions from images captured at a known altitude.

